《Cognitive Electronic Warfare An Artificial Intelligence Approach》读书笔记(四)了解频谱(ES,Electronic Support)
《Cognitive Electronic Warfare An Artificial Intelligence Approach》第四章的读书笔记。
目录
认知电子战系统的第一步是了解射频频谱ES(Electronic Support)。在人工智能中,ES被称为情况评估,它确定谁在使用频谱,在哪里和何时使用它等信息,并利用以上信息对决策DM提供支持。
本章讨论特征估计、辐射源特征描述和分类、数据融合、异常检测和意图识别等相关的人工智能/机器学习技术。
频谱态势感知(spectrum situation awareness,SSA)定义:收集有关频谱使用的不同信息,并对该信息进行处理以产生融合频谱图像的手段。SSA收集、组织和处理电子战所需的频谱数据,需要快速实时地进行。
未来的SSA系统可以利用深度学习模型发掘潜在特征,并在任务过程中更新学习模型,减小数据有限造成的学习误差。
SSA将射频数据与非射频数据(如视频和静止图像、空间光学测量、作战情报)融合在一起,创建一幅在空间、时间和频率上都准确的一致的战场空间频谱公共作战图像。(第4.3节)
异常检测(第4.4节)、因果推理(第4.5节)和意图推理(第4.6节)完善了整个图像,以了解事件的影响并对决策提供支持。
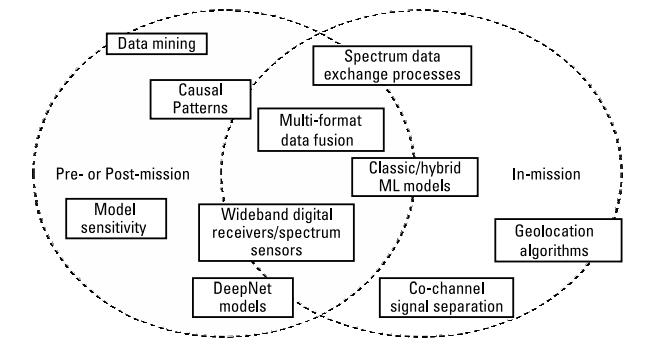
SSA结合各种技术,既包括传统技术,也包括认知技术。其中只有少数是认知性的。
| pre or post-mission | 任务前或任务后 | in-mission | 任务中 |
|---|---|---|---|
| data mining | 数据挖掘 | classic/hybrid ML models | 经典/混合机器学习模型 |
| model sensitivity | 模型灵敏度 | geolocation algorithms | 地理定位算法 |
| deepnet models | 深度网络模型 | co-channel signal separation | 同信道信号分离 |
| causal patterns | 因果模式$^*$ | spectrum data exchange processes | 频谱数据交换流程 |
| wideband digital receivers/spectrum sensors | 宽带数字接收机/频谱传感器 | multi-format data fusion | 多格式数据融合 |
1. 发射器的分类和表征
ES系统的一个基本组成部分是了解环境中有哪些发射器以及它们在做什么,将发射器分类,标识其类别(例如,调制分类或平台类型)。
特征化指的是捕获信号环境的行为,而不一定对它进行分类。例如,可以识别出信号的特征是高斯的,或是在时间间隔内重复的。
得到的行为表征可以优化分类,已进行的分类可能体现一定的行为特征。因此,表征和分类可以相互补充。
• 发射器可能通过多次发送信号来掩盖自己的身份。
• 在没有先验训练数据的情况下,未知发射器通常具有已知的行为特征(如频率和脉冲参数),但以未知的方式组合它们或将它们用于不同的目的。开集分类技术识别和聚类这些新的特征,并构建新的类。
1.1 特征分析与行为表征
行为特征描述信号环境,包括瞬时能量、频率、散射和重复模式及其概率等特征。传统的特征分析是通过先验模型来计算的,前提是可以预期信号的特征。
传统方法用于脉冲宽度、脉冲重复间隔和频率等特征的统计分析,并将它们映射到已知信号的数据中。
DeepNet方法在用大量的数据训练时可以识别信号环境中的潜在特征,捕捉到的特征具有更高的保真度。可以捕捉到很难用明确的数学表达式建模的行为特征,或者随着环境条件的不同而显著不同的行为特征。当区域是部分可观测时,也往往更有效。
将传统方法与DeepNet方法结合可以提高效率。例如,无线电信号强度通常遵循与距离平方成反比的定律,但受天线增益、多径和衰落等因素的影响。
可以同时使用传统方法和DeepNet。DeepNet学习潜在特征,而传统方法处理物理、人类因素和其他数据。
表征问题决定了观测到的发射体的准确程度,计算出发射机的行为模型,从而进行下一步行动的推断。
1.2 波形分类
机器学习技术应用在波形分类领域。支持向量机用于雷达发射器信号识别、电子战应用的雷达天线扫描类型识别以及自动数字调制识别。使用深层网络能够识别射频信号的潜在特征,例如使用CNN对无线电发射器进行分类,使用CNN对雷达发射器进行分类,以及使用RNN捕获时间模式。GAN是增加数据的有效方法,可以用更少的示例来训练模型。
1.3 特定发射器标识
SEI或RF指纹提取(fingerprinting)是唯一识别每个射频发射器的过程,与接收器属性或发射器如何改变及环境因素无关。
Chen等人[29]使用聚类和无限隐马尔可夫随机场来处理与时间相关和与时间无关的特征。Nguyen等人[30]使用高斯混合模型(GMM)对信号进行聚类,然后进行分类。凯恩等人。[31]在基于图像的信号表示上使用CNN。
2. 性能评估
机器学习技术捕捉观察值$o$和性能度量$m$之间的关系,通常回归模型:$m=f(o,c)$。应用的技术包括支持向量机、神经网络、贝叶斯网络和马尔可夫决策过程(MDP)等。
性能评估用一组可观测数据来学习。下图显示了不同射频环境下器件性能的估计结果。
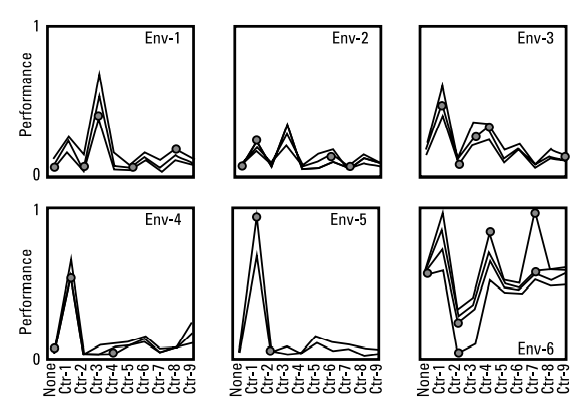
本例使用支持向量机对性能空间进行建模,并使用传统特征来描述环境。
观测环境得到相应的观测值$o$。通过模型估计在该环境中使用策略s时的效用评估值$m_k$(即,$m_{k}=f_{k}(o,c)$的示例),并在图形上用点标记。训练好的模型评估不同策略的性能,从已知情况推广到其他情况。
机器学习模型$f_k$评估了不同环境下不同策略对应的性能$m_k$。圆点代表观测值,只有圆点的值是已知的,其他点由模型估计。
机器学习还可以根据对敌方的干扰效果来评估性能。
3. 多智能数据融合
为实现最佳态势感知,决策者需要获得来自多个来源(如雷达、无人机、地面或水下系统、舰船、战斗机、天线和传感器网络)的数据。因此认知电子战系统必须进行数据融合。
数据融合是将来自多个来源的数据进行整合,以产生更准确的推论的过程。难点包括:
• 数据质量问题,测量不确定性可能会影响准确性和置信度。
• 不同来源数据产生的结论冲突。
• 高维数据难以选择。
• 操作时序可能会导致信息延迟或无序。时间是需要记录的最重要的特性。
3.1 数据融合方法
文中只提到《Sensor and Data Fusion》等书中讲了数据融合的方法。
3.2 数据融合范例:面向本地化的5G多INT数据融合
例如智能手机可能会对所在情景做出假设,或者用户的当前情况做出假设。
文中对智能手机情景感知过程中采集的各类数据做了列举,分析了其中的关键性能指标(KPI),在KPI数据不同的情境下,分别可能做出室内,室外等场景假设。
3.3 分布式数据融合
分布式数据融合指:(1)感知其本地环境,(2)与其他代理通信,(3)共同尝试推断关于特定过程的结论。
分布式数据融合的重要约束是:电子战环境中采取尽量有限的通信。
高质量的元数据(第8.1.1节)是分布式数据融合的关键要求。其难点不在于频谱本身的准确性,而在于如何跨越在多个节点上收集的频谱获取多个信号,并将它们聚合成被观察发射源的单一一致视图。
这需要统一信号解释和发射器行为聚合的方法。此外,来源和可信度显著影响数据转换、和做出的推论。
总的来说,分布式数据融合可以改变数据的总体灵敏度(例如,单个传感器的感知可能不敏感,但是来自传感器阵列的感知是敏感的)。
分布式分析是减少数据歧义和提高较慢时间结论的准确性的有效方法。
4. 异常检测
异常旨在发现数据中不遵循已知行为的部分。
复杂异常可以进一步细分为上下文异常和集体异常。上下文或条件异常是特定上下文中的异常数据实例。集体异常是相对于整个数据集的相关数据实例的异常集合。集体异常中的个别数据实例本身可能不是异常,但它们的组合出现就是异常。
异常检测技术依赖于机器技术,如分类、最近邻、聚类、统计学、信息论等。常见的基于分类的异常检测技术通常涉及支持向量机、贝叶斯网络、基于规则的方法和深度网络,尤其是自动编码。
文中提到了人工智能中的”概念飘逸“,将其理解为轻度的灾难性遗忘,即学习过程中因为样本分布的偏离,可能使得已经学习到的特征被遗忘,文中提到的解决方法包括分割模型等,未详细解释。
5. 因果关系推断
因果推断试图从观察到的数据中提取因果关系,通常是在没有明确的方法来验证假设的情况下。因果层次结构包含以下:
• 联想,观察。$y$的发生是否依赖于$x$:$p(y|x)$?
• 干预,演示。做一个动作$a$是否会影响$y$:$p(y|do(A))$?
• 想象,假设,在其他情况下会发生什么:$P(y|x^{'})$?
因果模型通常用于医疗、战争和其他社会环境的分析。
文中列举了参考文献中的一些例子,未详细解释。
6. 意图识别
计划识别、活动识别和意图识别都是通过被观察者与环境的交互以及被观察者之间的相互作用来进行推断。在认知电子战系统中,这样的技术可以用来观察和理解战场上所有参与者的计划、活动和目标。
这样的过程包括三个不同的任务。
首先,活动识别识别由代理执行的最低级别的操作,侧重于原始的观测,以提供对正在发生的事件的清晰、明确的识别。
其次,目标识别识别被观察代理的最高级别期望结束或目标状态。这样的过程在高层次上询问代理试图实现什么。目标识别和活动识别这两个问题都是:给定一系列观察结果,这两个任务都会生成一个标签来标识正在执行的活动或正在实现的目标。
最后,计划识别不是为目标活动产生单个标签,而是将目标的活动和目的进行相关联的结构化(分层)表示,以捕捉活动及其最终目标的因果关系。这些预测可用作EW BDA的比较功能。
对抗性意图识别给识别算法带来了挑战,因为行为者试图隐藏或伪装他们的行为,或者故意改变他们的活动模式以使识别变得困难。
计划识别算法分为以下两类:
• 计划识别将观察到的动作描述为从一个状态到另一个状态的函数,并捕获它们的执行引起的整体变化。
• 分析过程中的计划识别,其将问题视为在可能的计划空间中进行搜索。将可能的计划构成计划空间,然后在该空间中搜索与输入的观测最一致的计划。
最新的研究纳入博弈论的方法来识别计划,其中被观察的代理人积极地试图避免检测。对抗性计划识别任务包括在可能的对抗性计划集合上推断概率分布,通过计算纳什均衡来选择最合适的响应。[6.2节]
6.1 自动目标识别与跟踪
电子战中常见识别任务之一就是目标跟踪。
Schmidlin等人提出了一种多目标雷达跟踪问题的早期人工神经网络方法,在该方法中,一个ANN识别轨迹并提供轨迹预测,而另一个RNN将情节关联到轨迹。与卡尔曼滤波相比,人工神经网络方法具有更高的精度,而卡尔曼滤波对噪声具有更强的鲁棒性。
对于雷达和SAR图像中的目标检测,CNN已经非常有效。CNN和支持向量机可以结合在一起:CNN被训练,然后支持向量机替换最终的分类层。这种结合利用了CNN学习特征的能力和支持向量机对高维输入空间进行泛化的能力,达到了很高的精度。
7. 结论
ES是每个电子战系统的核心。ES的质量直接关系到EP和EA的性能。ES分析环境并收集制定决策DM的信息。
深度学习在自然语言和图像处理方面取得了显著的突破,这在很大程度上要归功于三个因素:更强大的计算机,标记的数据,以及网络的构建。
然而,深度学习并不意味着放弃经典的机器学习和各类专业知识。应选用最适合任务、满足系统目标和要求的方法。



